
High-Speed Autonomous Off-Road Robot
Driving in circles. Rolling over was probably not good for the battery, it was taped right on top.

Underactuated Robot Control

I've been working as an RA with Prof. Josh Smith at UW on a control system for underactuated robotics, i.e. robots that don't have a motor in every joint. The robot I work on is known as the acrobot, and is a two-segment arm with a powered elbow joint. The goal is to have it stand up and balance on a knife edge. This is a challenge because it has to be balanced by controlling just the elbow joint, and the equations of motion for the acrobot are far from simple. My research has been to apply instance-based learning, a type of machine learning, to the acrobot.
Computer-controlled Robotic Arm
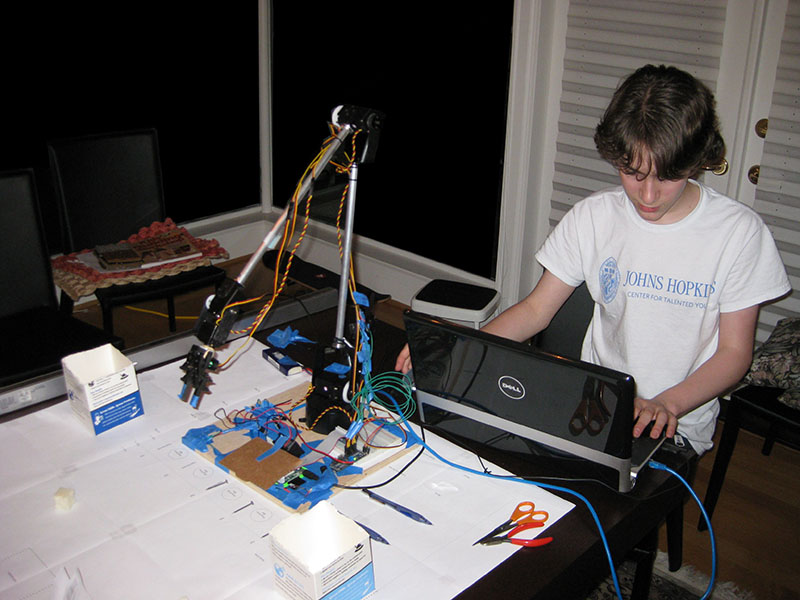
Testing the robotic arm. Note the nails and pens arrayed around it as pick-up items and the cut-off milk cartons as the drop bins. Control is through the mouse and keyboard, but once the claw was positioned above an object, software took over and picked up the object and dropped it into the target bin.
Tricopter with custom Arduino-based software navigation controller

The tricopter hovering in a test flight.
3D printer #1: Makerbot Thing-O-Matic kit
A great little printer, was easy to put together.
